Built-In Controllers
CarSim, TruckSim, and BikeSim are self-contained simulation tools that do not require any other software to run. In addition to the 3D vehicle models based on fundamental multibody physics and vehicle component equations (tires, suspensions, powertrain, aerodynamics), they include both open-loop and closed-loop control options.
The open-loop options support driver/rider controls from external software that may be used for model extension and co-simulation, including hardware-in-the loop setups that have physical controllers and/or humans working in driving simulators. However, in many scenarios, the intent of the simulation is to predict feasible behavior of both the vehicle and the human driver or motorcycle rider. In support of these objectives, the VS Math Models in CarSim, TruckSim, and BikeSim have built-in closed-loop controllers for steering (and rider lean in BikeSim) and speed.
Built-In Driver and Rider Controls
The VS Math Model controllers cause the vehicle to follow a target path at an appropriate speed. They support up to 500 target VS Paths and can switch between them as needed. They can also switch from open-loop to closed-loop control in order to simulate a wide range of scenarios that involve driver control.
Path Following (CarSim and TruckSim)
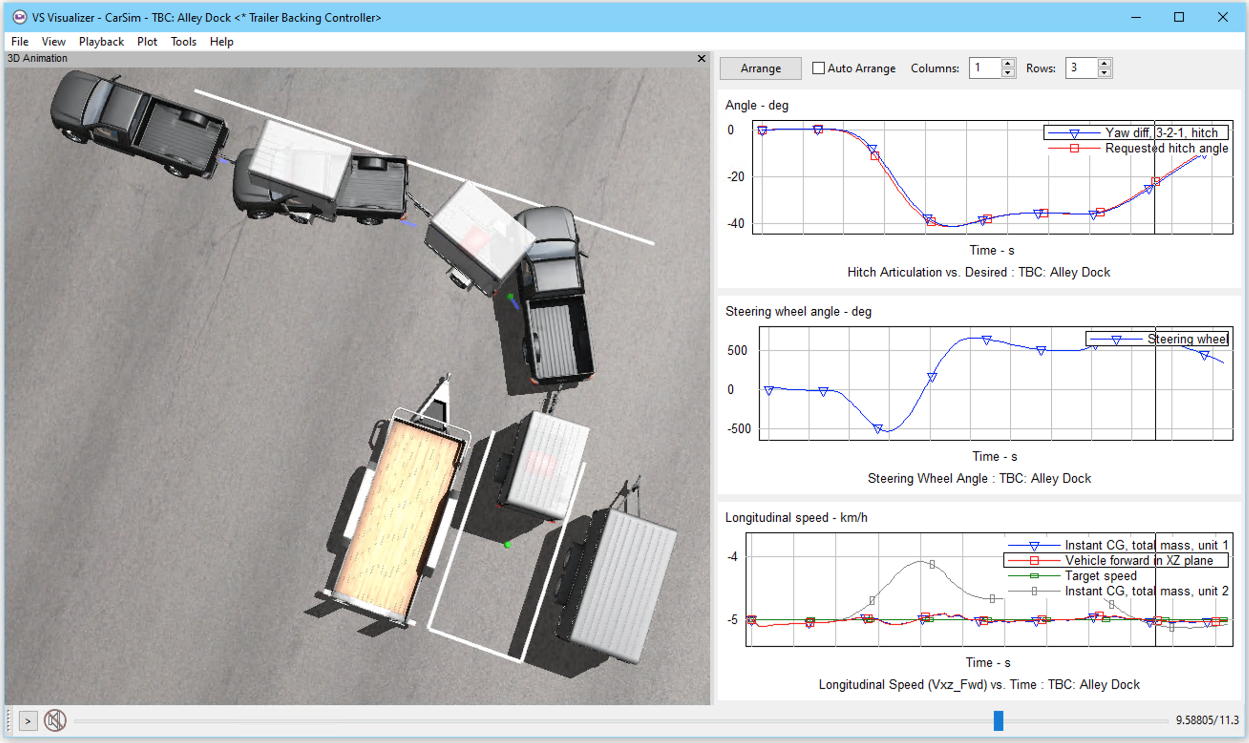
The closed-loop steering controllers in CarSim and TruckSim steer the vehicle to follow a prescribed path. Several modes of operation are available: steer by angle, steer by torque, steer with a single preview point, or steer with an optimal control method. The controller works while driving forward or in reverse. In addition, a Trailer Backing Controller is included for following a target point while backing up with a single trailer.
Path Following (BikeSim)
The BikeSim path follower uses a preview point and determines a target lean angle needed to have the point follow the designated path. A closed-lop steer controller is used to obtain the target lean.
Speed Control
The VS Math Models include a speed controller that can use the powertrain and brakes to match specified requirements. The basic modes are:
- Open-loop throttle, braking, and gear selection. The open-loop throttle and braking may be added to close-loop commands from the speed controller, to simulate interventions for a driver/rider (human controls are mimicked by the closed-loop controller).
- Closed-loop control with multiple modes for following a target speed or target acceleration. Target speed/acceleration may be constant or a Configurable Function that changes the target as a function of time and/or station along a designated path.
- Closed-loop control using path preview, described below.
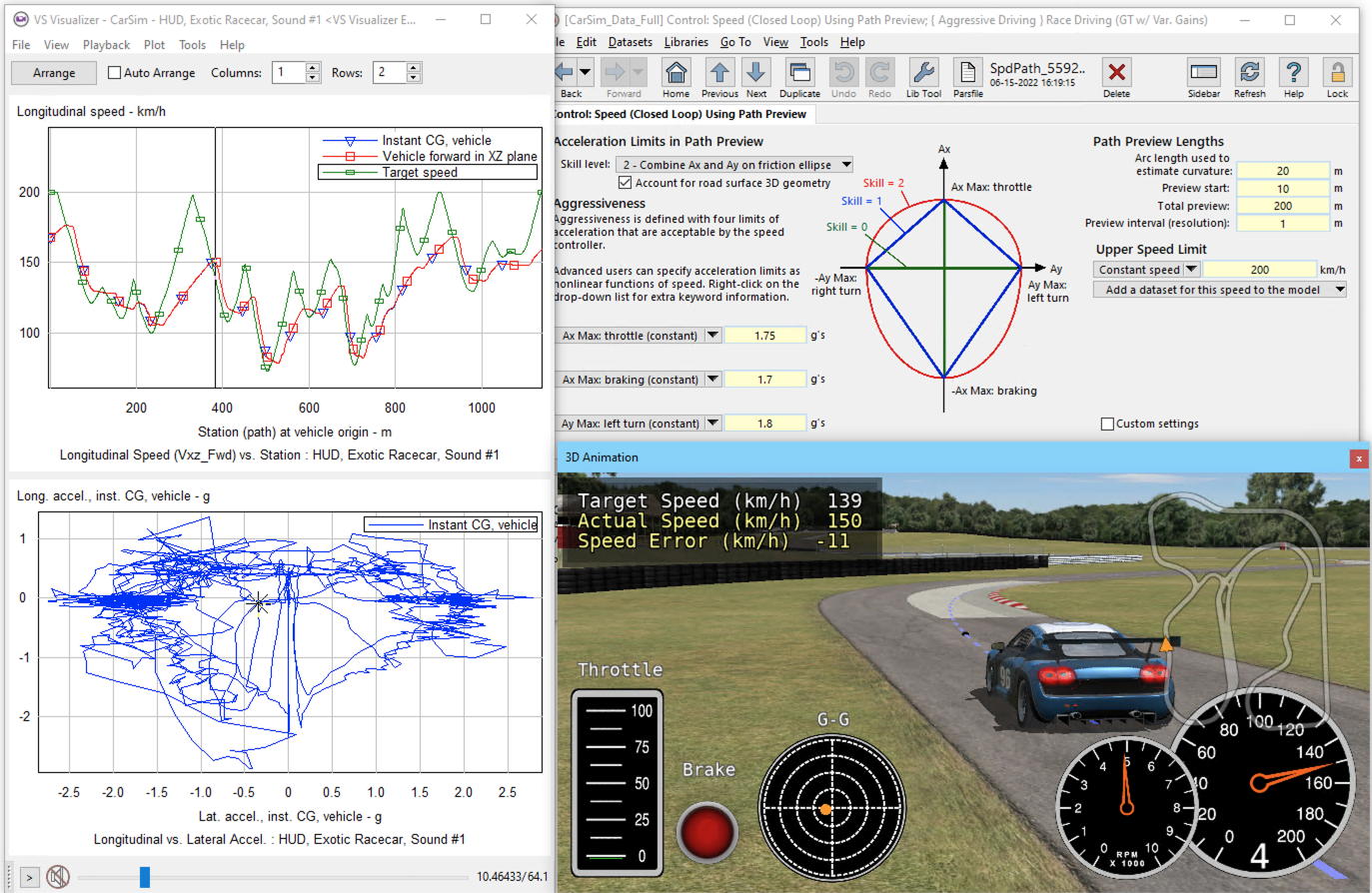
With the path preview mode, the controller determines a target speed based on several settings combined with the environment:
- Preview time
- Aggression and skill levels
- Speed limit specified as constant or functions of station along a path
- Acceleration limits for left, right, forward, backward, specified as constants or functions of station along a path
- Horizontal curvature of the target path (converted to lateral acceleration using target speed)
- Lateral slope (banking) of the path, used to adjust the acceptable lateral acceleration
- Vertical curvature, used to adjust the acceptable longitudinal acceleration
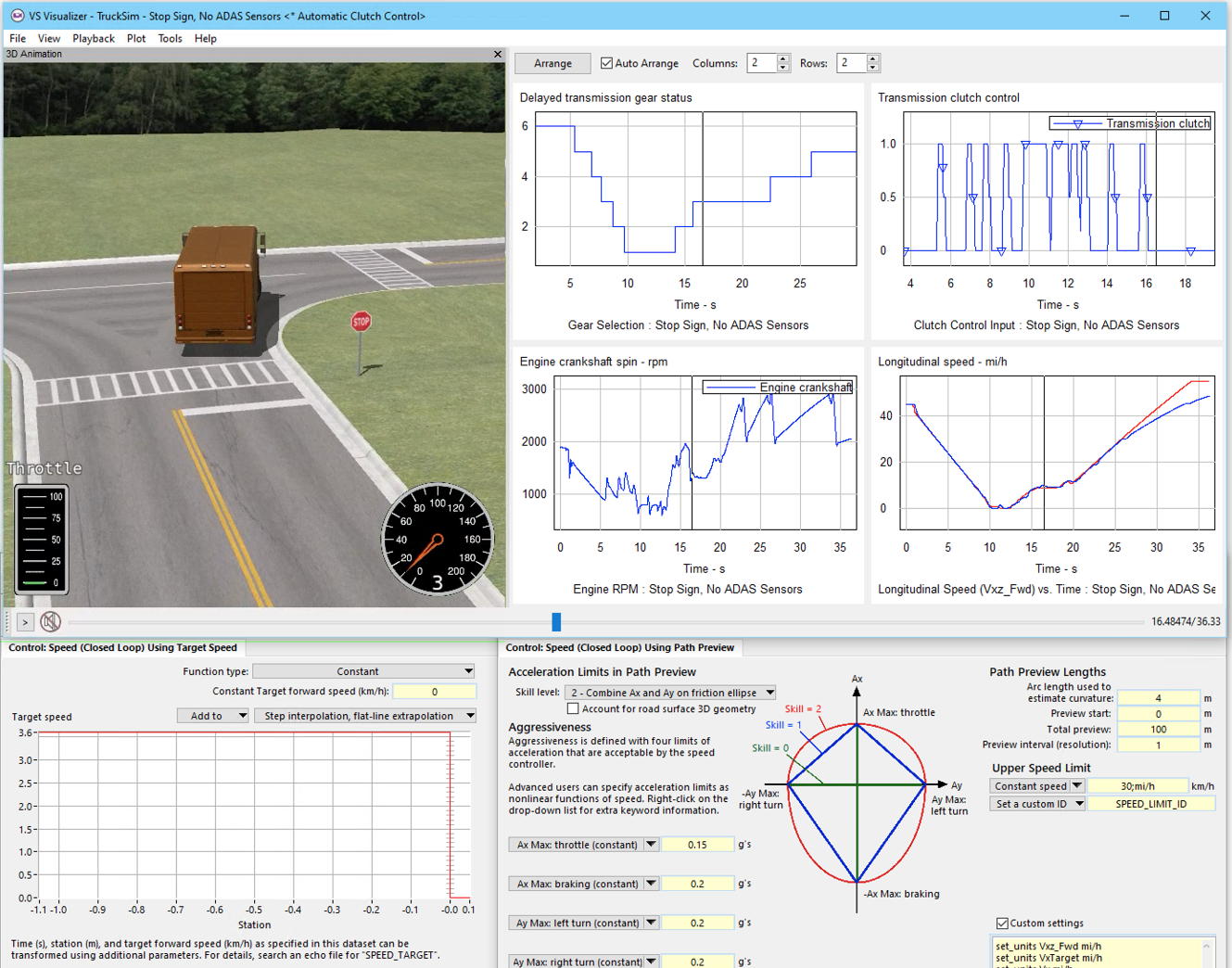
The path preview mode was originally introduced to easily produce target speeds and accelerations for race tracks or winding roads where the simulations could limit lateral acceleration. It is also used for many ADAS scenarios where the vehicle must prepare to stop at a specific point (stop sign or light). This is set up fairly simply be specifying a target speed that is constant until the stopping point, when it steps down to zero. The controller uses the stop requirement to automatically derive a target speed subject to the limits in acceleration.
Built-In Vehicle Controllers
Detailed models of hardware controllers are handled by linking the VS Math Model to external software with model extension or hardware. In cases where only a basic behavior is needed, controllers built into the VS Math Models may be activated.
Anti-lock Brake System (ABS)
CarSim and TruckSim support a VS Command INSTALL_ABS_CONTROLLER that installs some parameters that activate and specify the performance of a built-in ABS controller that releases brake pressure to avoid lockup. The parameter values can be set from the Brake system GUI screens.
Electronic Stability Control (ESC)
CarSim and TruckSim support a VS Command INSTALL_ESC that installs some parameters that activate and specify the performance of a built-in ESC that modulates the brakes of individual wheels to maintain stability and mitigate the threat of rollover. The parameter values can be set in the GUI with a dedicated library Control: Electronic Stability.
Shifting
Shifting for vehicles with transmissions is normally triggered by upshift and downshift shift schedules. These are always used for automatic transmissions with discrete gears that transfer torque through hydraulic torque converters. They are also used to mimic shifting by a driver in vehicles with manual transmissions.
Clutch Control
Vehicles with mechanical clutches synchronize three controls to shift gears:
- The shift is triggered by a new gear request.
- The clutch is disengaged to separate the input/output shafts when the shift occurs, and then re-engaged when the shift is complete.
- The throttle is dropped to avoid accelerating when the shift occurs, and then restored to the value requested without the effect of the shift.
The shift controller can simulate advanced built-in vehicle controllers or mimic a human driver. The shifting options are supported by a dedicated library Control: Clutch Shifting Timelines.
VehicleSim Products
CarSimTruckSim
BikeSim
SuspensionSim
Built-In Features
ADAS: Moving Objects and SensorsAnimation and Plotting
Automation and COM
Built-In Controllers
GUI, Database, and Documentation
Modular VS Math Models
Paths and S-L Coordinates
Roads and Terrain
VS Commands Language
VS Scene Builder Tool
Co-Simulation Technologies
Real-Time HIL SupportSimulink, FMI/FMU, LabVIEW
Unreal Engine
VehicleSim SDK
More
Engineering Services